近年来,机器人技术得到了迅猛发展,在各行各业得到广泛的应用,如工业生产、航空航天、医学、深海探索、军事等领域。随着产量和作业环境的不断变化,有些工作仅靠单机器人难以承担,需要通过多台机器人之间联合作业才能够完成。
基于2D和3D视觉的联合机械手定位检测系统包含多个工作单元,学生可以直接体验生产现场的操作流程和原理分析,并进行相关应用探究,满足自动化类、机电一体化等主要专业的需求,涵盖电子信息、计算机、工业机器人等众多专业领域的专项技术和专业核心技术的教学、科研和实训
产品功能
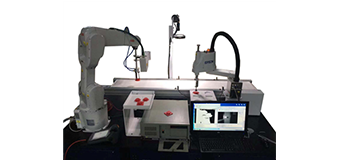
该系统包括两个机器人,一个四轴机器人和一个六轴多关节机器人,两个机器人分别放在流水线的两个工位上,通过3D视觉检测物品进行定位,然后引导六轴机械手将物料框中的被测物抓取到传送带上,通过传送带将被测物运送到固定位置,再用2D视觉进行定位,用四轴机械手吸取物品送到所需位置。
功能列表
产品特点
1. 系统拥有多个工作单元,功能多,技术先进。学生可以直接体验生产现场的先进技术,同时也可体验到生产现场无法体验的故障诊断、生产执行系统等。
2. 产品采用模块化设计,创新组合,符合未来先进制造流水线的柔性和适应性要求。
3. 汇集了当前及未来先进的机器人技术、现场总线技术、运动控制技术、图像处理和诊断技术等。
4. 直接与实际生产线结合,利于培养实用型、创新型专业技术人才。
5. 开放式的系统设计,学生和老师在探究系统技术和理论的同时,可以进行自我设计,提升系统的设计结构和设计要求,同时可以进行先进技术与先进理论的各种尝试。
6. 先进的教育理念,以“用知识、实践知识”为宗旨,采用项目的形式开展教学、科研及技术开发,利于培养创新型、实践型专业技术人才。
实验软件平台
基于视觉的机械手实验系统软件集成了完整的视觉控制、参数修改功能、机械手运动控制功能、HALCON标定及算法等,提供的实验算法及其扩展功能均可在HALCON 交互式的编程环境HDevelop 中实现。学习者可以通过软件控制整个系统中各个组件的功能程序,更加深刻地理解和学习实际项目工程中如何实现各个组件之间的协调功能,以及深入理解机器视觉和机器人之间的手眼标定算法和运动控制功能。
关键模块
系统组成
商品标签




