结构光三角法3D实验系统
三维重构的方法有很多种,常被人们所熟知的有结构光三角法、多视角立体视觉、双目立体视觉、焦深法、立体光学法和时间飞行法等。每种方法各具优缺点,也有各自适应的场合。其中结构光三角法以其原理成熟、结构简单的优点,成为众多方法中应用最为广泛的方法之一。
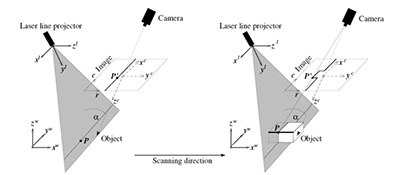
结构光三角法的核心思路是激光器投下一根细而亮度均匀的激光条,产生一个激光面。摄像机与激光器形成一定夹角,通过标定建立激光面与摄像机图像坐标之间的相互转换关系。当物体经过这个激光面时,激光条将会产生相应的形变。拍摄求取形变激光条上的世界坐标,即可等同于求取物体表面的世界坐标。当整个物体匀速通过激光面,就可得到物体表面的zwyw坐标,而表面的xw可通过运动速度、运动精度以及摄像机的采集速度来保证。
学习者通过该实验系统可深入浅出地了解到结构光三角法的3D重构原理,以及熟悉3D重构或3D测量的操作流程。
应用场景
♦ 轨道交通
♦ 路面检测
♦ 汽车制造
♦ 轮胎检测
♦ 逆向工程
♦ 机器手引导
♦ 三维测量
♦ 工业检测
系统特色
♦ 平台运动速度分手动/自动两种模式调整,模拟实际生产流水线的不同速度
♦ 提供三种不同价位、不同模式的解决方案
♦ 配有编码器、磁性传感器、IO卡以及报警装置
♦ 软件界面友好,支持二次开发,可实现功能扩展
♦ 可通过USB口控制电机运动,提供配套运动控制软件系统组成

优点:
※内嵌处理器,有着PC-Base方案无法媲美的处理速度
※可同时满足高分辨率高速度的应用场合
※激光器、摄像机可灵活选择
※内嵌算法,对反光有很好的抑制。
缺点:成本较高
商品标签



